Одно время я увлекался сборкой роботов-машинок на Ардуино и Raspberry Pi. Играть в конструктор мне нравилось, но хотелось чего-то большего.
И как-то раз, блуждая по Алиэкспресс, я набрел на алюминиевое шасси для танка. Выглядело это творение в сравнении с машинками из пластика как Феррари в сравнении с телегой.
Я сделал себе подарок на Новый год, танк приехал, был собран и дальше надо было его оживлять. Я снял с машинки Raspberry, конвертер питания, контроллер мотора и батарею. Все это было поставлено на танк и радостно заработало.
Дальше на питоне был написан нехитрый REST API для руления, а на Андроиде — такая же простая программка, позволяла управлять танком, дергая этот API.
Танк должен стрелять, и следующим шагом стало появление у него камеры. У меня не получилось угадать с корпусом для камеры — в открытом состоянии он камеру не держал, а в захлопнутом — был настолько тугим, что у камеры отлетала линза. Помучившись, я просто примотал камеру изолентной к крышке корпуса. Теперь танк мог не просто ездить по комнате, но и делать фотки.
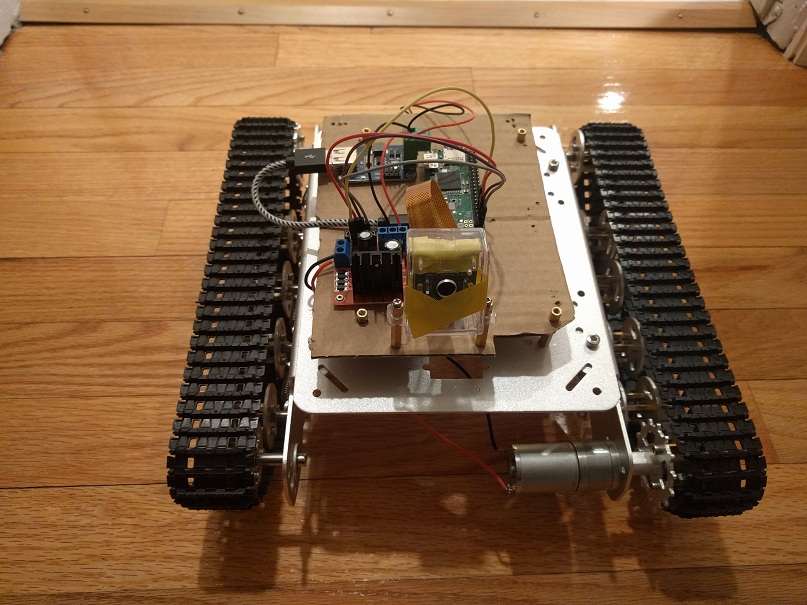
Стоит отметить серьезное преимущество танка над машинками в домашних условиях — на гусеничном ходу ему нет разницы, ехать по жесткому полу или по ковру. Колесный транспорт буксует на мягком ковре, вплоть до невозможности поворачивать.
Дальше мне хотелось развивать танк в направлении автономной навигации, опираясь на фотки с камеры. Пришлось погрузиться в мир компьютерного зрения и открыть для себя OpenCV. Началось все с распознавания цвета и контура — печатал на бумаге красный кружок, клеил его на телевизор и заставлял робота вертеться, пока кружок не был найден.
Статья: https://habr.com/post/358230/
|
 Главная
Главная